|
There are various models of LADAR
instruments that exist today, we used a Riegl LMS-25, which can produce a
scene that is a 360 view around the scanner. Once a scanning run
begins, the LADAR instruments tilts up and down (tilt axis,
e)
from strait up
vertical (+90 degrees) to 45 degrees below horizontal (-45 degrees) as it
rotates around (pan axis,
j).
As it moves around, it shoots a laser beam very rapidly (about 300 times a
second), each time recording the distance to whatever target it is aimed
at (range value, x) as a point value in x,y,z space. The scanning
origin is 0,0,0. The accuracy of of this value is around 20
millimeters, but at close range it is even better than that (at a range of just a few meters
you can even see the
features of a truck
about 75 meters from the scanner).
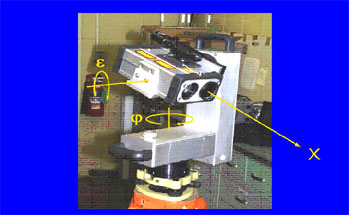
Image of Riegl LADAR scanner displays the three primary
variables of data
that the instrument collects.
e
- tilt axis
j
- pan axis
x – range value |